01 / THESIS
Thesis in Progress
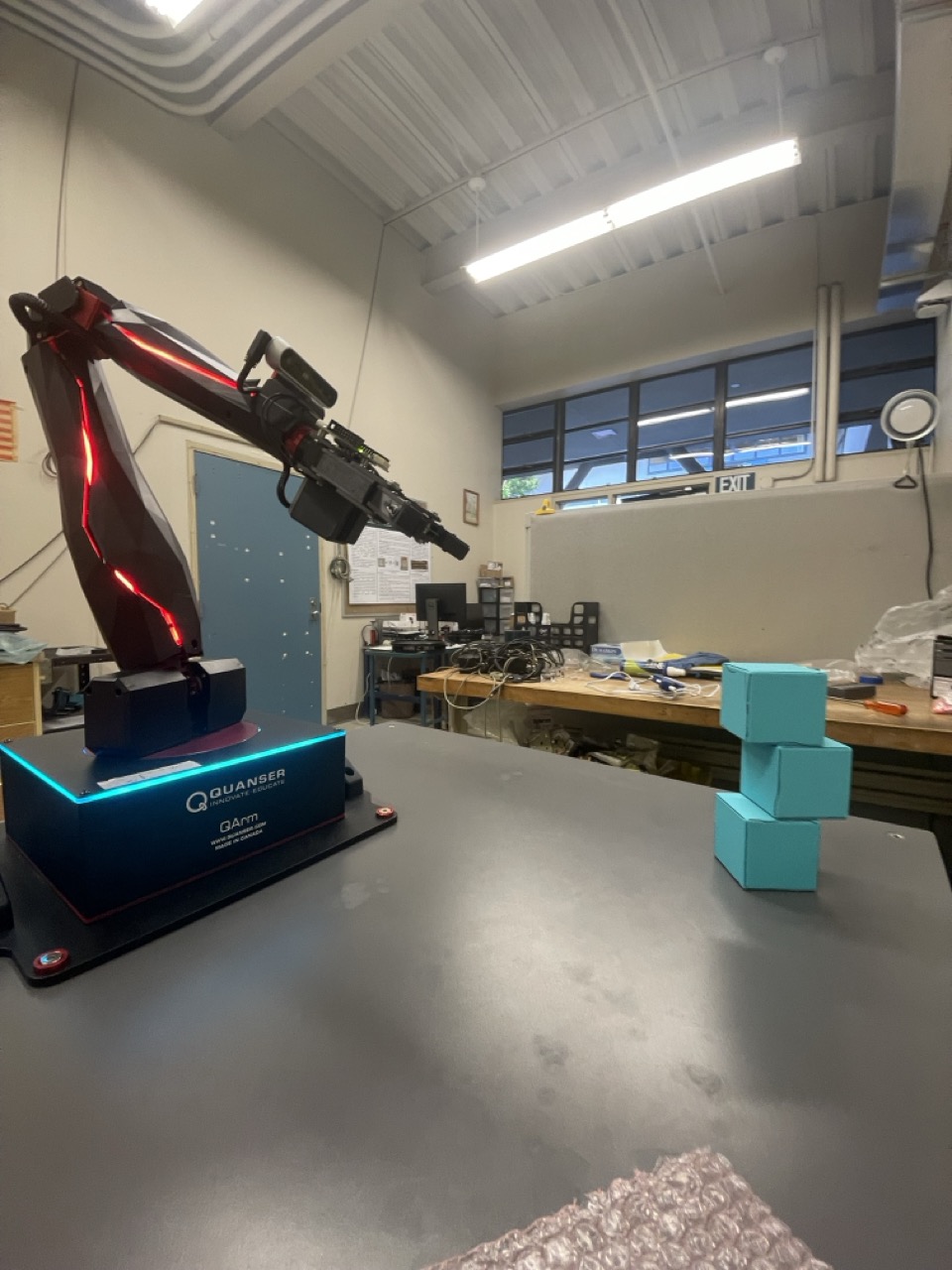
LLM-Guided Autonomous Pick and Place
Closed-loop manipulation on the Quanser QArm using RGB-depth sensing, YOLO instance segmentation, and an LLM planner. The system sorts and stacks cubes with grasp checks, scene validation, gain tuning, and motion safety limits.
Tools: Python, YOLO, RGB-D sensing, current sensing, Quanser QArm, control tuning, LLM planning